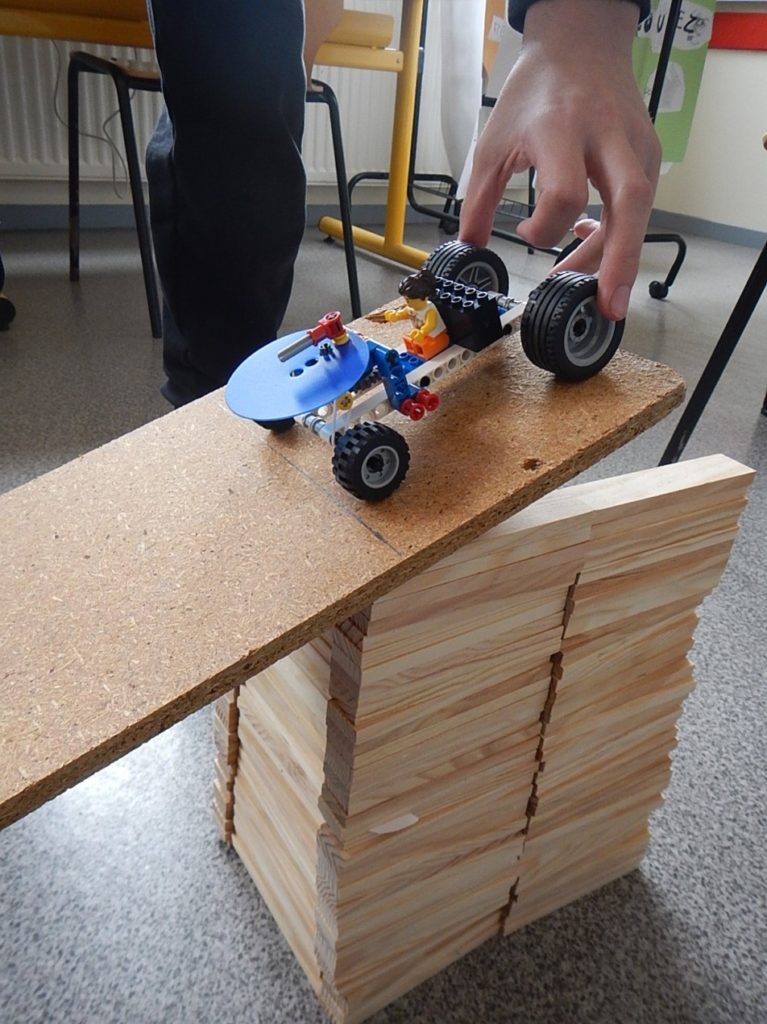
J’ai construit une voiture avec le matériel Mecatech. J’ai suivi un plan de construction. J’ai assemblé des roues et des barres grises avec des vis et des boulons. J’ai utilisé un tournevis. J’ai bien aimé mais c’était un peu difficile.

J’ai construit une voiture avec le matériel Mecatech. J’ai suivi un plan de construction. J’ai assemblé des roues et des barres grises avec des vis et des boulons. J’ai utilisé un tournevis. J’ai bien aimé mais c’était un peu difficile.
Hier, jeudi 3 juin, j’ai construit un manège constitué d’engrenages planétaires avec le matériel le Learning lab. Un engrenage planétaire est composé d’une ou plusieurs roues dentées qui tournent autour d’une roue centrale.
Ensuite je l’ai programmé sur la tablette.
Quand la touche flèche en haut était enfoncée , le moteur tournait en sens horaire quand la touche espace était enfoncée, le moteur s’arrêtait .
J’ai bien aimé suivre un programme de construction et filmer le manège terminé.
La machine d’Anticythère permet de calculer des positions astronomiques. C’est un mécanisme de bronze comprenant des dizaines de roues dentées.
 Cette machine est le plus vieux mécanisme à engrenages connu ( 87 avant JC) .
Cette machine est le plus vieux mécanisme à engrenages connu ( 87 avant JC) .
Cette année, nous avons lu l’histoire de R. Kipling, Le Chat qui allait son chemin tout seul.
Nous avons construit les personnages en cubes. Tout d’abord nous avons tracé les patrons sur du papier pointé puis nous les avons collés sur du carton de couleur. Nous avons plié et décoré les cubes.
Nous avons fait des décors sur des grandes feuilles.
Nous nous sommes entraînés à lire les paroles des personnages et nous avons filmé la mise en scène.
En début d’année 2021, j’ai travaillé en ULIS sur des projets technologiques et scientifiques.
J’ai d’abord construit une caisse à savon en Lego avec un plan et j’ai mesuré des distances parcourues.
J’ai ensuite construit une main robotisée avec le matériel Learning Lab (Asco et Celda) : j’ai fait le programme demandé sur l’ordinateur en langage S4A (scratch) et je l’ai amélioré. La main a bougé. La balle légère a été agrippée par le robot.
J’ai ensuite construit un robot marcheur : il marche en avant en arrière et il s’arrête.
Théo